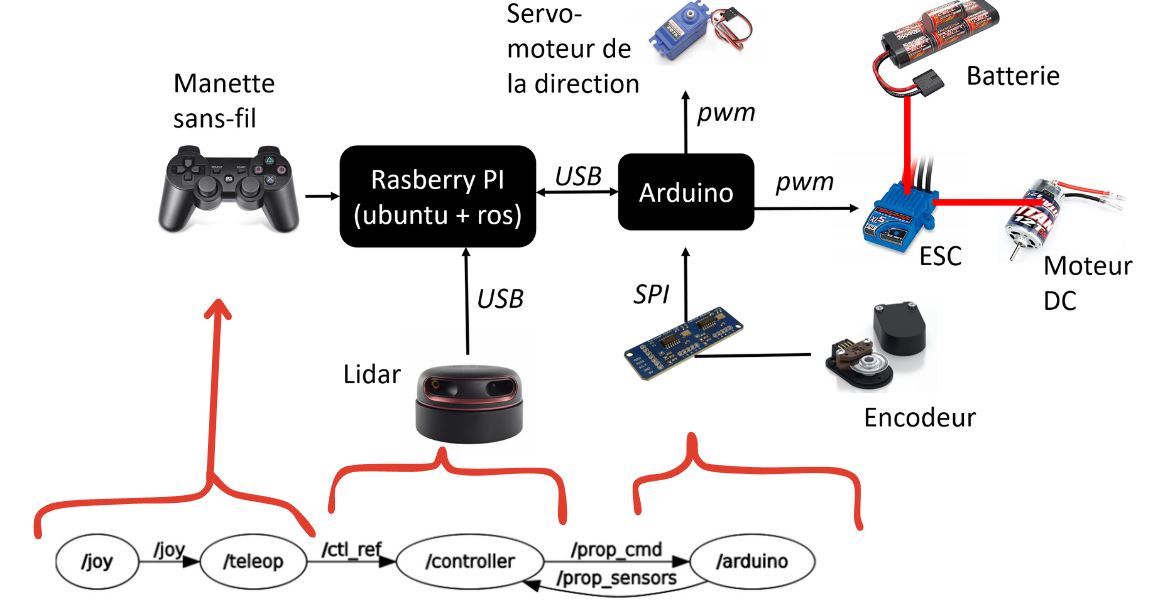
Architecture
Preview
Functions

Dynamic Modeling
Robot

Web UI

About the Project
This project establishes a control system for an
autonomous vehicle specializing in road debris detection and cataloging.
It integrates obstacle detection, path tracking, debris identification, mapping, and reporting.
Sensor efficiency, such as LiDAR, wheel encoders, IMUs, and cameras, is assessed, employing a behavioral
architecture with an arbitration system responsive to sensory data and environmental changes.
The study also involves programming two key services for remote vehicle command and position broadcasting,
with protocols suited to their operational constraints.
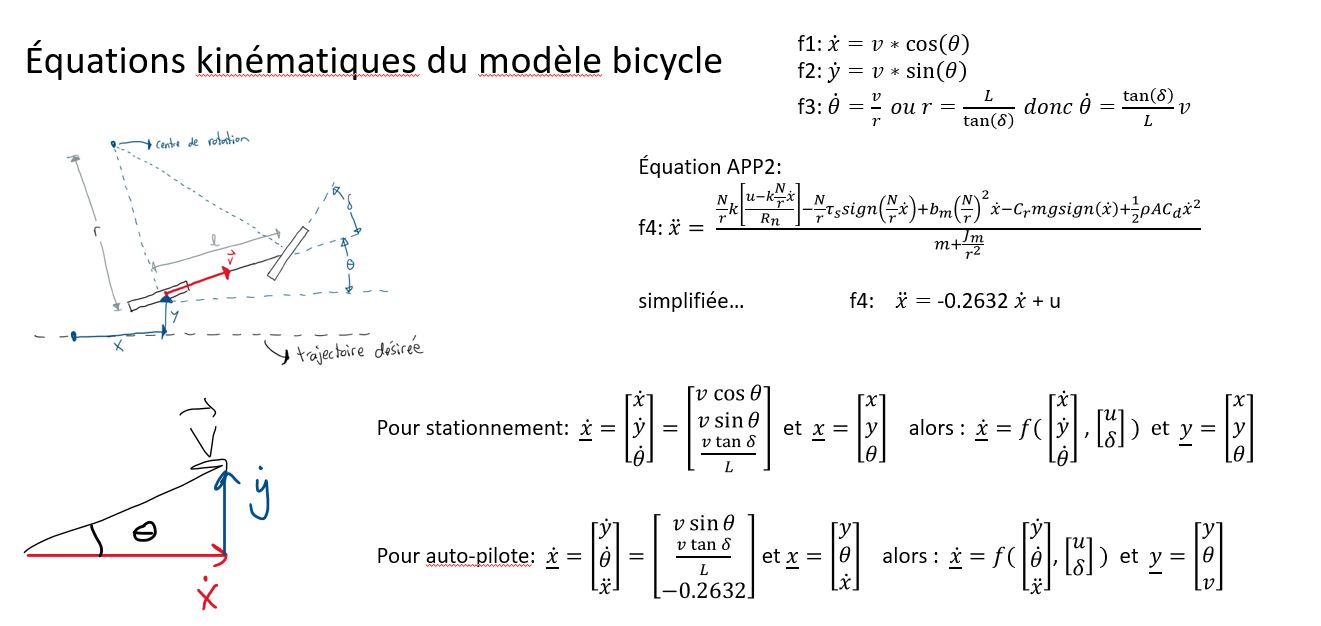
Additionally, it includes developing a dynamic vehicle model
incorporating lateral dynamics using a simplified bicycle model to relate lateral position and longitudinal speed to
input commands of motor voltage and steering angle.
Furthermore, the research included time-frequency analysis for a PID controller,
transforming multiphysics models into linear equations for analysis, and integrating TCP/UDP protocols via ROS for communication.
A web interface was crafted for remote robot operation, all orchestrated through ROS programming
Skills Used
- Robot Operating System Programming (ROS)
- PID controller design (Time Frequency Analysis)
- Multi Physics System Modeling
- Digital Signal Processing
- TCP/UDP and SSH Communication protocols