Architecture
Preview Video
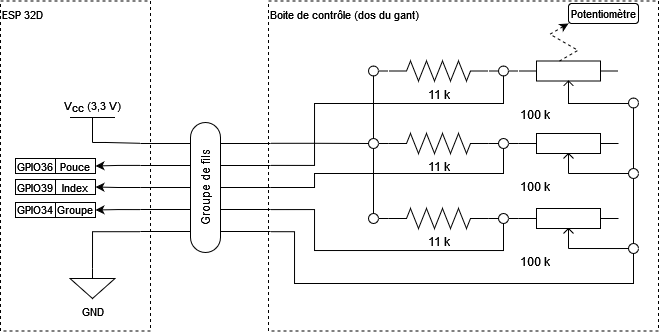
Electronic Design
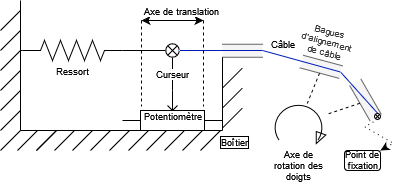
Mechanics Modelling
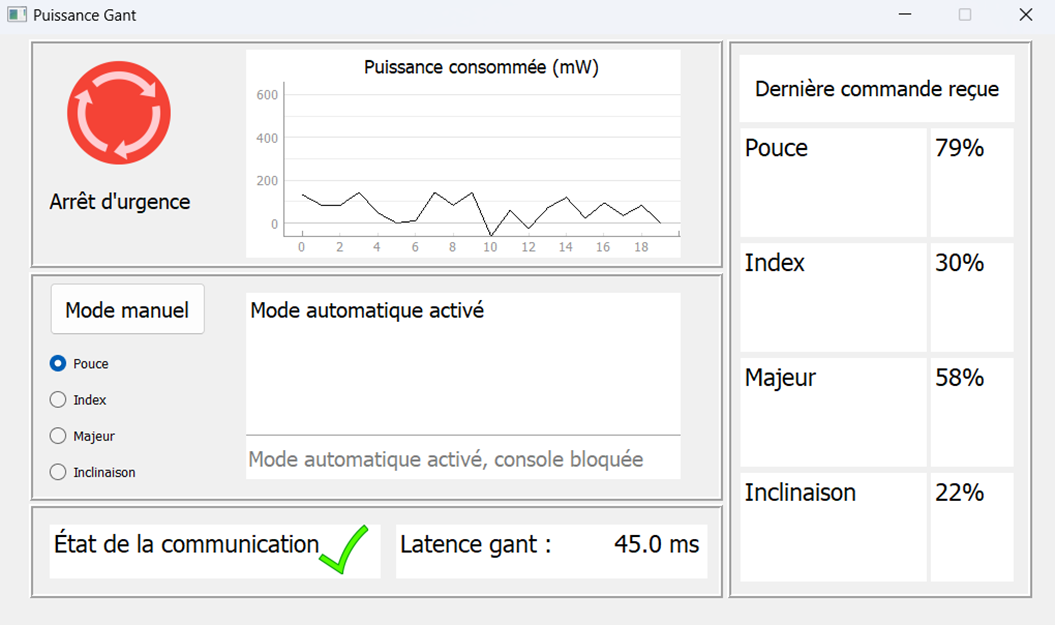
User Interface
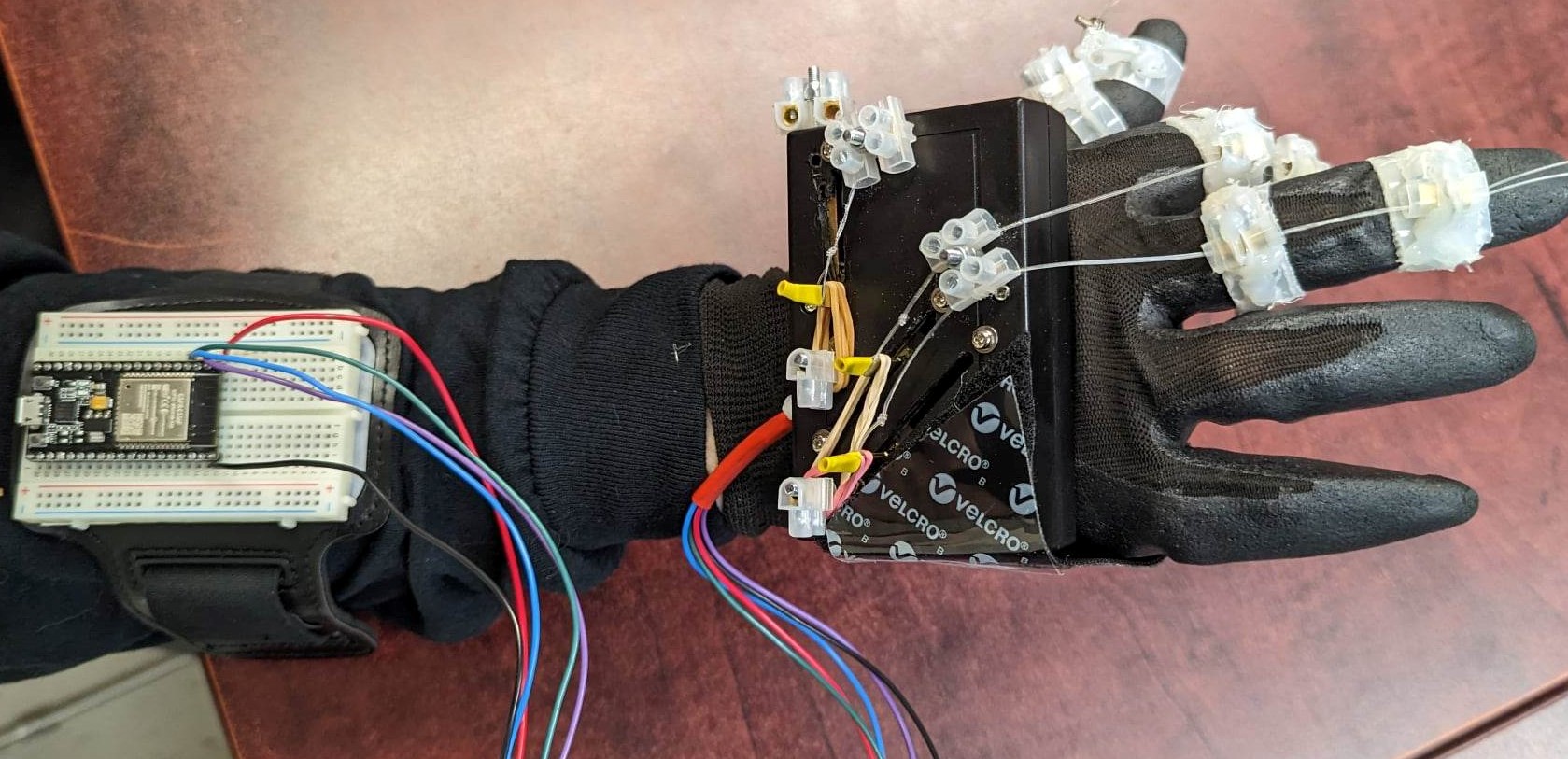
User's Glove
About the Project
The Power Glove team aimed to develop a robotic hand and an intuitive remote control system.
When the user dons the glove and articulates their fingers, the glove’s sensors detect these movements and relay the
corresponding commands, causing the robotic hand to replicate the finger motions in real time, thus achieving a synchronized
bionic extension of the human hand's capabilities.
The final product is a three-fingered hand, with each finger operated by a glove fitted with sliding potentiometers.
A user interface allows monitoring and manual control of the robot's status.
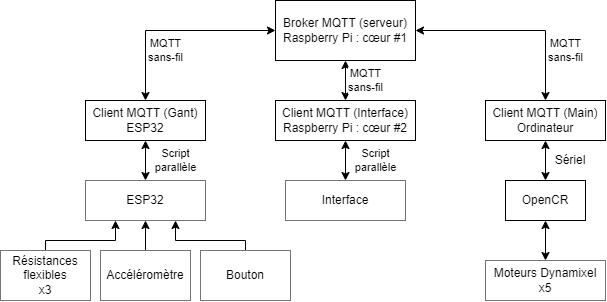
Three main components communicate via a WI-FI wireless communication server. An ESP32 board reads the glove's status
and sends finger positioning data to the system. A computer receives this information and relays it to an OpenCR board,
which operates the hand's motors. A second computer displays a user interface that presents valuable information and enables
manual hand control.
Skills Used
- Embedded Systems Programming C++
(RaspberryPi, OpenCR, Arduino) - 3D Modelling
- MQTT Serial Communication (ESP32)