Preview
Other Functions Preview
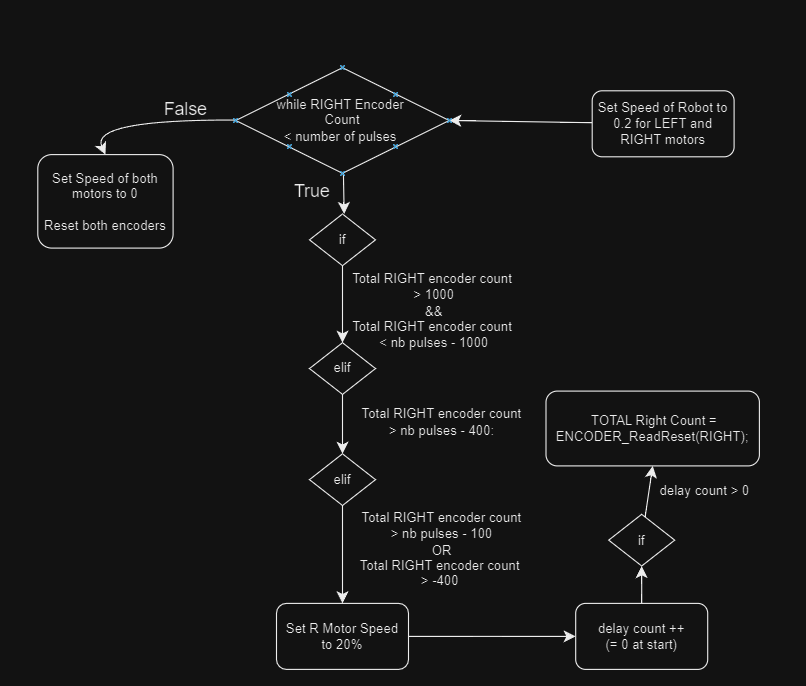
PID Flowchart - RIGHT Motor
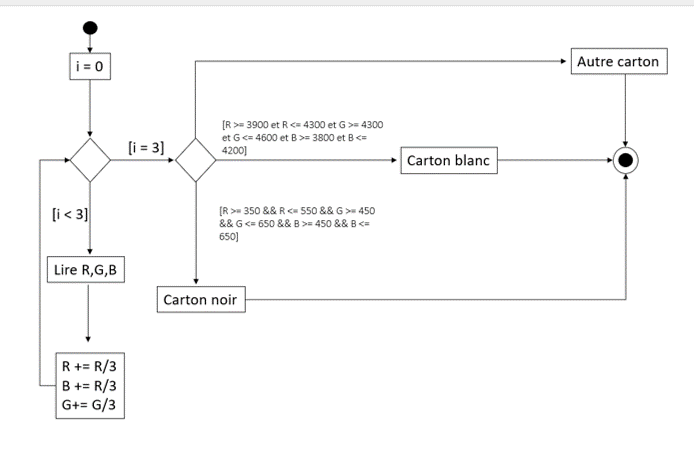
Colored Line Following Algorithm
Robot

Embedded UI

About the Project
The first iteration of the robot consists of two servomotors with encoders for its wheels, a sound sensor, a reflectance sensor to follow lines on the floor, and finally a servomotor for its claws.
These components are all connected to an Arduino board. The robot was initially made to achieve the following challenge:
1) The robot follows the square lines on the floor, it goes around the square until it hears a rining sound.
2) When it hears the ringing sound, it goes to knock over a pin in the middle of the square.
3) It then goes to pick up a white ball located at the top of the square, with its 3D printed claws.
4) It brings the ball to a drop off zone.
In the robot's second iteration, we have turned it into a plant watering robot. We have added a pump connected to a battery,
a humidity sensor to detect if the plant needs water or not, a color detecting sensor, a little LCD screen, and multiple 3D printed parts for the water hose and water reservoir.
Each different plant has an assigned colored tape on its vase. By doing so ,the plant can be identified with the color detection sensor.
A little screen on the robot is used to give the user feedback information such as: the plant's identity, the plant's water needs, and the plant's humidity percentage.
The screen can also be used to start the robot, to consult the plants database and to view the robot's watering history.
Skills Used
- Arduino Programming C++
- Solidworks 3D Modelling
- Basic Circuit Design