Architecture
Preview
Functions
Dynamic Modeling
Robot

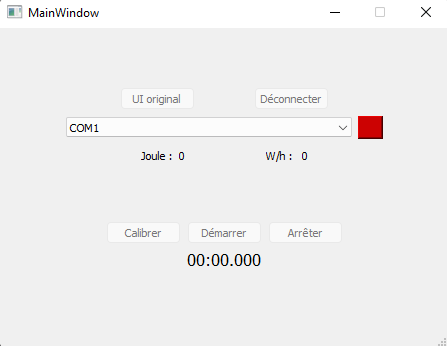
QT Creator UI
About the Project
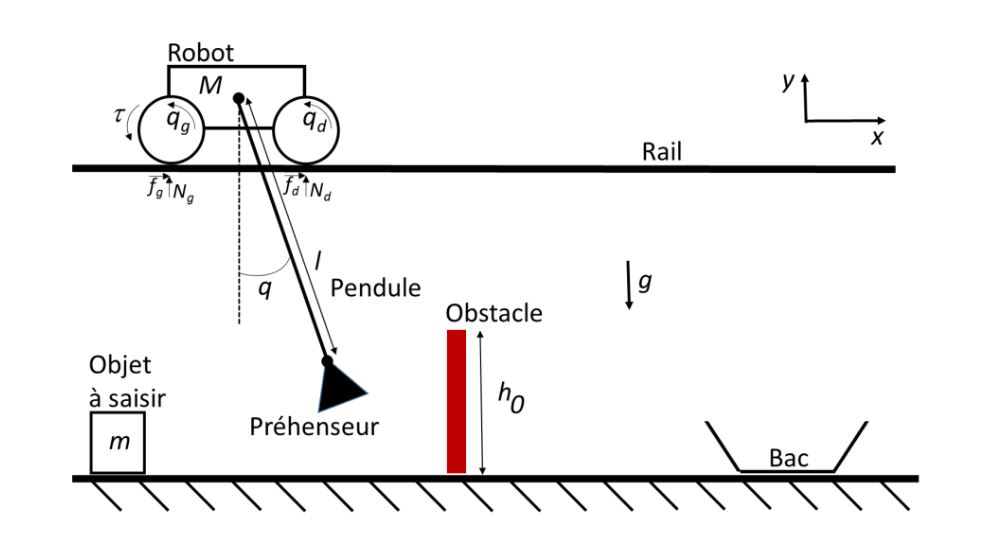
This project involves designing a robotic system that operates on a rail to transport a predetermined mass
from a specific pickup point to a designated drop-off location. The robot will carry the load on a rigid rod, akin to a pendulum,
which is not motorized, adding complexity to the control of the system.
To navigate over a tall obstacle, the robot precisely coordinates its sensors and actuators.
This synchronization allows the robot to swing the pendulum, which is connected to the mass via an electromagnet, in a calculated manner.
By carefully timing the acceleration and the pendulum's swing, the robot successfully propels the mass over the obstacle.
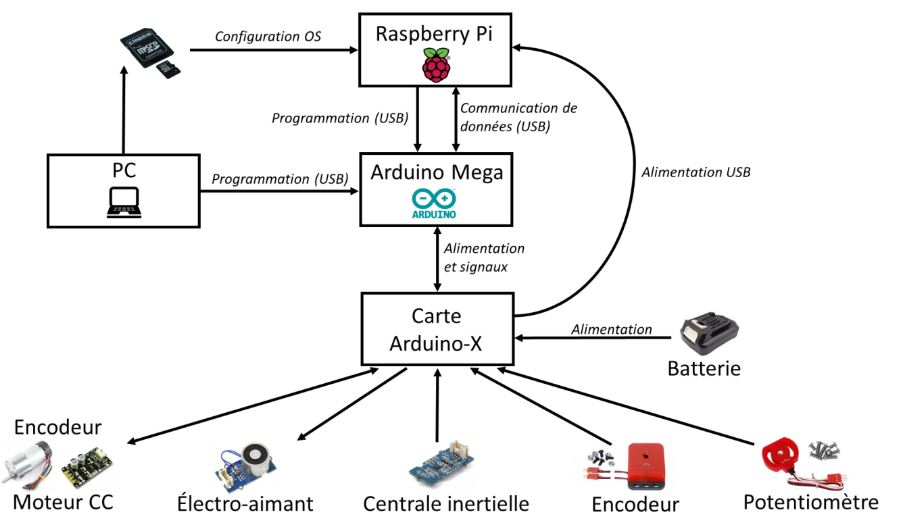
The robotic system combines a Raspberry Pi and an Arduino Mega to orchestrate the movement of a rail-mounted robot.
The Arduino Mega directly controls the hardware: motor and encoders for movement, an electromagnet for the pendulum,
and a potentiometer for angle measurement. The Raspberry Pi acts as the command center, processing data from the Arduino and
providing a user interface. The user sets up and programs the system via a PC, which communicates with the Raspberry Pi. A battery powers the entire setup.
Skills Used
- Matlab Dynamics Modelling
- Raspberry Pi programming
- Arduino Programming
- QT Creator User Interface Design